| by Jan Hakenberg, Ulrich Reif, Scott Schaefer, Joe Warren | published as viXra:1407.0163 – July 21st, 2014 |
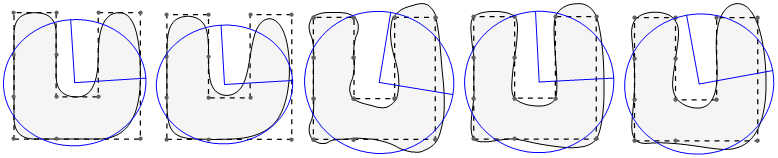
Figure: We compute the exact area, centroid, and inertia of the 2-dimensional sets bounded by subdivision curves. The illustration shows the principle axes of the inertia tensor drawn at the centroid of the area; five different subdivision schemes are used to demonstrate the universality of our derivation.
Abstract: We derive the (d+2)-linear forms that compute the moment of degree d of the area enclosed by a subdivision curve in the plane. We circumvent the need to solve integrals involving the basis function by exploiting a recursive relation and calibration that establishes the coefficients of the form within the nullspace of a matrix.
For demonstration, we apply the technique to the dual three-point scheme, the interpolatory C1 four-point scheme, and the dual C2 four-point scheme.
| Moments Defined by Subdivision Curves * |
|
670 kB |
| Moments Defined by Subdivision Curves (on viXra.org) |
|
link |
| Moments Defined by Example Subdivision Curves |
|
link |
| Subdivision and Moments Implementation (Mathematica 9) |
|
55 kB |
The first author was partially supported by personal savings accumulated during his visit to the Nanyang Technological University as a visiting research scientist in 2012–2013. He'd like to thank everyone who worked to make this opportunity available to him.
Beauty is the first test;
There is no permanent place
for ugly mathematics.
Godfrey Harold Hardy
The moments derived in the article have diverse applications:
Our article is structured as follows. First, we recap the basics of curve subdivision: the basis function of a scheme, and refinement matrices. Chaikin's scheme serves as an example. Then, we derive the formula for the moment of degree d for binary, stationary subdivision schemes. We demonstrate the practicability of our formalism on several popular schemes. The computation of moment values defined by a number of simple example curves serves as a reference for alternative implementations.
The schemes that are covered by our treatment are listed here:
| Scheme for curves | Subdivision weights | Remark |
|---|---|---|
| linear B-spline | 
| interpolatory, results in a polygon |
| quadratic B-spline Chaikin 1965 | 
| dual |
| cubic B-spline | 
| |
| Three-point scheme Hormann/Sabin 2008, and Quartic B-spline | 
| dual, ω=1/32, ω=-1/48, quadratic precision |
| C1 four-point scheme Dubuc 1986, Dyn/Gregory/Levin 1987 | 
| interpolatory, default ω=1/16, smooth for 0<ω<0.192729... |
| C2 four-point scheme Dyn/Floater/Hormann 2005 | 
| dual, default ω=1/128, smooth at least for 0<ω<1/48 |
| C2 six-point scheme Weissman 1990 | 
| interpolatory, default ω=3/256, and ω=1/96 |
The more you collaborate,
the more competitive you become.
Simon Anholt

Figure: The monomials 1, x, y, x2, xy, y2 integrated over the domain bounded by subdivision curves give the moments.
Our article does not feature subdivision schemes with non-homogeneous rules. Two examples immediately come to mind:
Remark: Our subsequent preprint covers the area forms for the schemes that are listed here as future work.
We believe that the best product decisions are made
by the people who are actually doing the work.
Valve