Marsokhod is a vehicle developed by the Mobile Vehicle Engineering Institute in St. Petersburg/Russia. The 6-wheeled, skid steered rover with wheel walking capability was intended to maneuvre on Mars in 1997. Eventually, the Mars-96 mission by the Russian Space Agency did not incorporate the robot.
Instead, the rover was employed for simulations on planetary exploration conducted at several cross country locations around Earth. The rover served as a platform to carry scientific loads. Tests emphasized aspects such as imaging systems, vision-based navigation, and remote control. None of the well-documented missions have challenged the extensive terrain capabilities of the rover. Nevertheless, researchers report on problems in precise navigation. The experience gained from these early tests must have influenced the design and operation of the Mars rovers Sojourner, Spirit and Opportunity.
Several publications discuss the mobility of Marsokhod, however, the researchers have neglected the inclination of the wheel blades. On weak grounds, the configuration of the blades greatly enhances the turning efficiency.
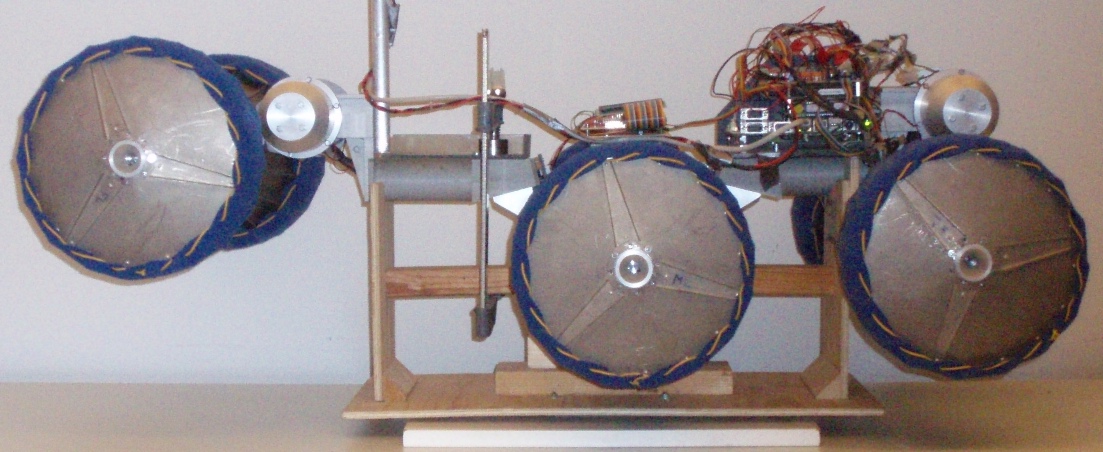
The Marsokhod at the Automation Technology Laboratory of the Helsinki University of Technology/Finland is at an early stage of development. The undercarriage is equipped with strong motors, high-resolution optical encoders, and electronics for control. The configuration allows to put the mobility of the robot to the test, and research on suitable driving parameters.
We derive wheel velocities to accompany the bending of the articulated joints. The position control to adjust the inclination of the joints has been utilized in a computer game before. We model the backlash of the joints for smooth wheel walking. Our efforts culminate in devising an autonomous parameter selection that enhances safety and performance of the robot. The techniques are incorporated into a convenient interface intended for operator control, or future application software.

| Mobility and Autonomous Reconfiguration of Marsokhod * |
|
3.7 MB |
| Auxiliary computations |
|
80 kB |
Besides the software for the controller, we develop the C program Mediator that addresses the CAN interface of the ReadyBoard. The program polls for incoming TCP network messages from a client that contain the low-level control of the controllers. Mediator decomposes the information, and forwards the commands to the individual controllers. The replies by the controllers are concatenated into a single TCP packet, and routed back to the client.
The Java program Joyride is the client software to Mediator. Joyride is either located on the ReadyBoard, or on another PC. For efficient development, we devise and test the control algorithms from a Desktop PC, but during the field experiments Joyride is hosted on the ReadyBoard. Low-level motor control via a wireless link is not safe, since the connection might stall and leave the motors in their present state.
Joyride converts high-level control, such as driving forward, turning, and bending the joints, into appropriate motor control that is forwarded to Mediator. When the network connection to the ReadyBoard is interrupted, Joyride assumes that the robot is commanded to stop.
Wenn ich es so überblicke, das Abenteuerlichste
in meinem Leben waren die Versuche,
dem Abenteuer zu entgehen.
Gabriel Laub
Results from early tests have suggested modifications of the electronics as well as the software on the controllers and the ReadyBoard. For instance, the H-bridge designed by Kalle Rosenblad, an engineer at the laboratory, has a superior performance over the H-bridge previously installed to Marsokhod. We equip Marsokhod with the new circuits.
Our solutions are inspired by field experiments, that we carry out in the vicinity of the Department of Automation and Systems Technology of the Helsinki University of Technology. Every outside run helped to improve at least one aspect of the system.
Typically, the literature conceives wheel walking in the context of cresting steep, sandy mounds. The bending of the joints alters the clearance between the axles. When maneuvring on a course with obstacles of up to the size of a wheel, the adaptive placement of the axles is another great benefit of the articulated joints.
single   
|
normal     |
extended    |
worm-like    |
The presentation of the thesis work and a demonstration of Marsokhod were held in August of 2008 at the Automation Technology Laboratory.
You forgot I gave these also
Would you leave the best behind?
So, Messieurs, you may release him
For this man has spoken true
Les Miserables


{kind=link}
{kind=link}
{kind=link}