






Together with students from all over the world, I participated in the CanSat workshop 2006 at the University of Würzburg.
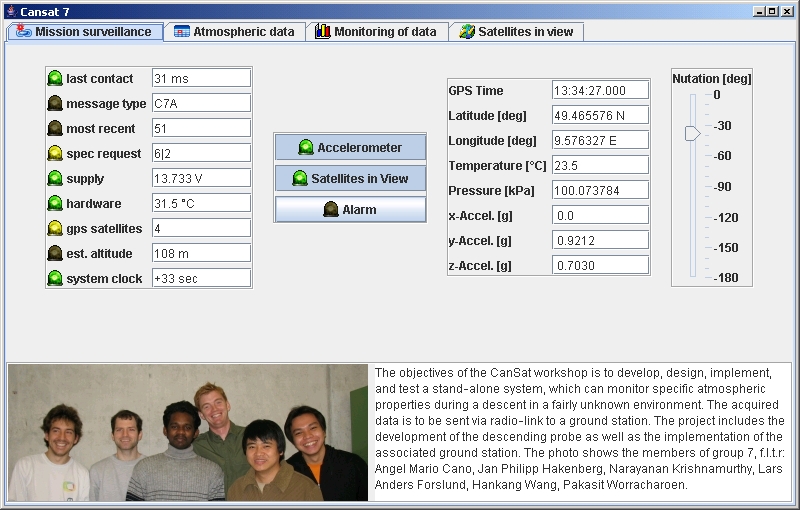
The objectives of the workshop is to develop, design, implement, and test a stand-alone system, which can monitor specific atmospheric properties during a descent in a fairly unknown environment. The acquired data is to be sent via radio-link to a ground station. The project includes the development of the descending probe as well as the implementation of the associated ground station.
The photo shows the members of my group, from left to right: Angel Mario Cano (Mexico), Jan Philipp Hakenberg (Germany), Narayanan Krishnamurthy (India), Lars Anders Forslund (Sweden), Hankang Wang (China), Pakasit Worracharoen (Thailand). Below, you find the documentation of the project.
| Mission Analysis and Planning |
|
590 kB |
| Implementation and Integration |
|
1.2 MB |
| Test and Evaluation |
|
2.0 MB |
| Final report |
|
3.0 MB |
| Schematics |
 schematics_cansat..
schematics_cansat..
|
90 kB |
 schematics_ground.
schematics_ground.
|
90 kB |
The pdf's are more fun than serious. Originally, some group members randomly inserted sentences from the Bible, or quotes from Shakespear to increase the value of the print. However, these contributions were removed by the more serious members of the group before submission.
Although our group did not make first place, the material on the website was used as by students in subsequent years.
Test what you fly,
fly what you test.
Anton Grillenbeck
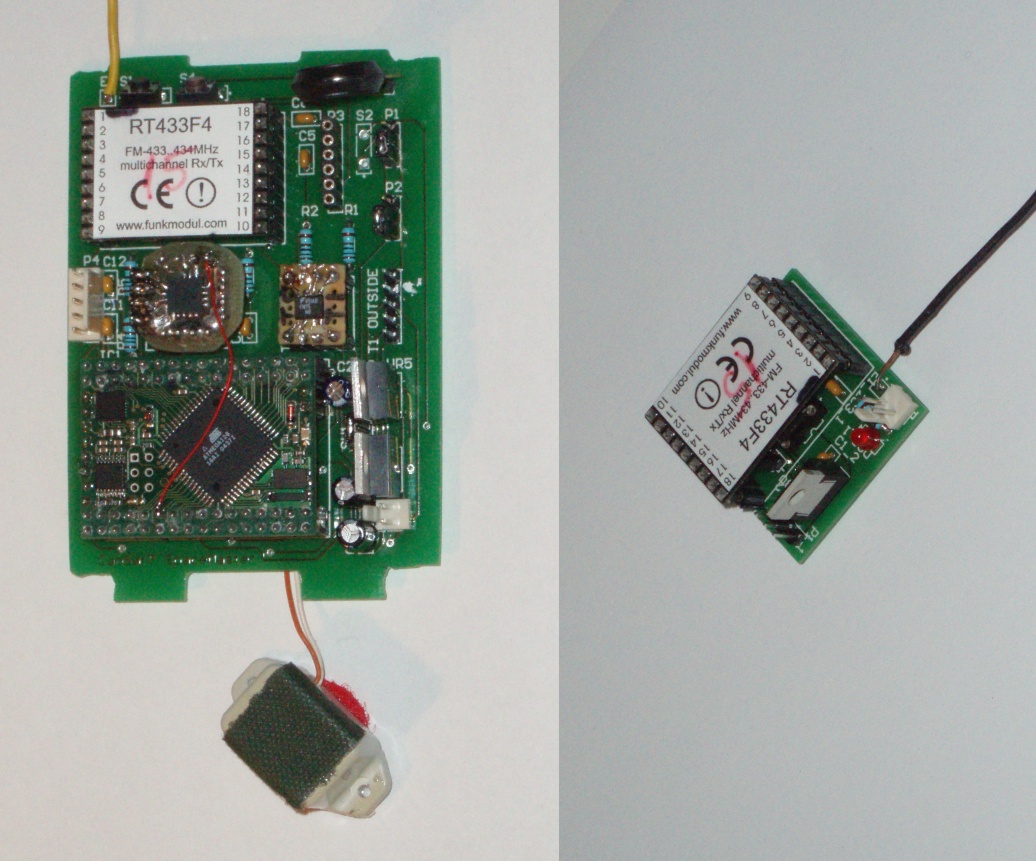
The cansat is operated by the ATmega128 microcontroller mounted on the Crumb128 board. The cansat is equipped with the following sensors:
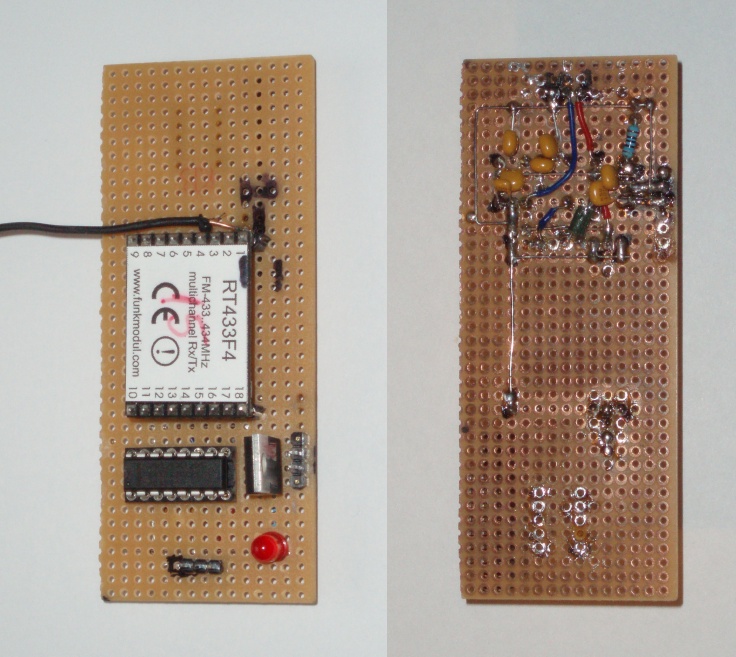
For transmission of data between cansat and groundstation we use the multichannel transceiver RT433F4. Our group was assigned the frequency 434.11 MHz, which is used for uplink and downlink.
Initially, we manufactured the circuits of cansat, and groundstation for debugging, programming and testing. After improving and extending the circuits, our group designed printed circuit boards to increase the reliability of the electronics. An ordinary aluminium can holds the cansat electronics. Several cables leave thru the top of the can. They connect to the GPS sensor, and the outside temperature sensor.



Thanks a million man!!
I've been greatly inspired by your work!
Alexander Nucera
We present the following codes to carry out a cansat mission: First, a stable operating system for the microcontroller onboard the cansat. Secondly, a pc program to record and monitor the mission. The interface between the two running programs is defined by the communication protocol.
| Operating system for Cansat (CodeVisionAVR C) |
|
10 kB |
| Groundstation (Java 1.5) |
|
2.5 MB |
Before we illustrate the communication protocol, and show the flow diagram of the cansat operating system, we show screen shots taken from typical missions:
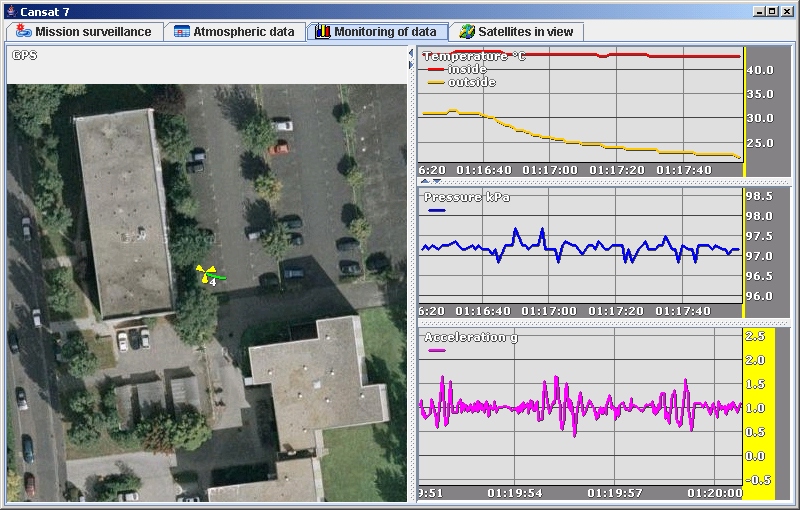
The first pane of the groundstation program
We also attach a picture of our group, and the mission objectives.
The table in the second pane records the athmospheric data frames that cansat generates and sends every second. The cansat device can store up to 2 min of athmospheric data. In case of a communication failure, the corresponding entries of the table are left blank until a request for the missing frames causes the cansat to downlink the missing frames.
The third pane comprises of several plots. We have implemented a window that projects the subsatellite point onto a map according to the longitue and latitude information. We also evaluate the ambient temperatures, the atmospheric pressure, and the absolute acceleration of the can.
According to Wikipedia, there are 24 gps satellites distributed equally among six circular orbital planes. The orbital planes are centered on the Earth, not rotating with respect to the distant stars. The six planes have approximately 55° inclination and are separated by 60° right ascension of the ascending node (angle along the equator from a reference point to the orbit's intersection). The orbital radius is 26600 km.
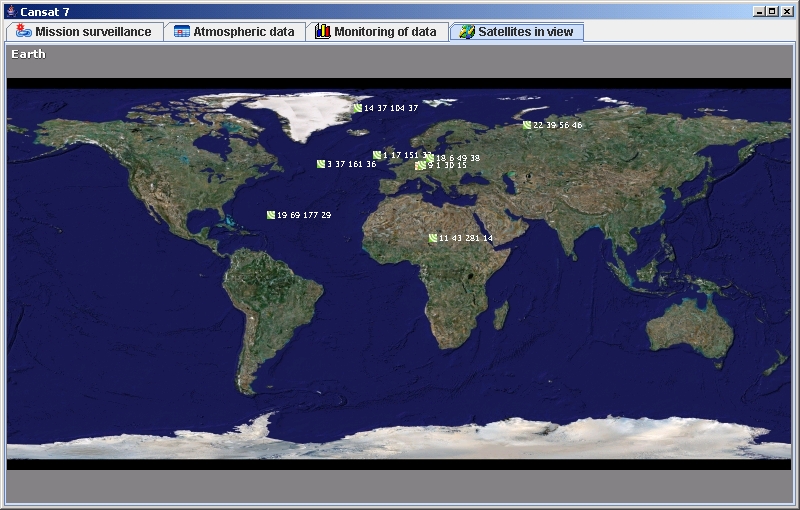
The last pane shows a map of the earth. The orange icon indicates the position of the cansat. Also, we plot the subsatellite points of the gps spacecrafts that are in view of the cansat. They appear in green together with their id number, elevation, azimuth, and signal strength with respect to the gps receiver. In our graphic, no subsatellite point should appear beyond a latitude of 55°.
Below, the graphic shows the various frames are sent between cansat and groundstation. The check icon next to the frame header indicates, that we append a checksum to the frame. This will enable us, to identify a corrupt frame on the receiver side. The number between the brackets is the size of the frame in bytes. For instance, the C7S frame consists of 42 bytes.
The following flow chart roughly reveals the behaviour of the cansat. The "GPS gga" message contains time, latitude, and longitude. The "GPS gsv" message encodes the GPS satellites that are in view. The cansat does not depend on any uplink, or acknowledgement from the groundstation. However, successful uplink causes the cansat to de-/activate subsystems, or downlink previously recorded athmospheric data frames.
Für das Können gibt es
nur einen Beweis: das Tun.
Marie von Ebner-Eschenbach

{kind=link}